Overview
Manuals
Robot & Controller Compatibility
Working Principle
Features:
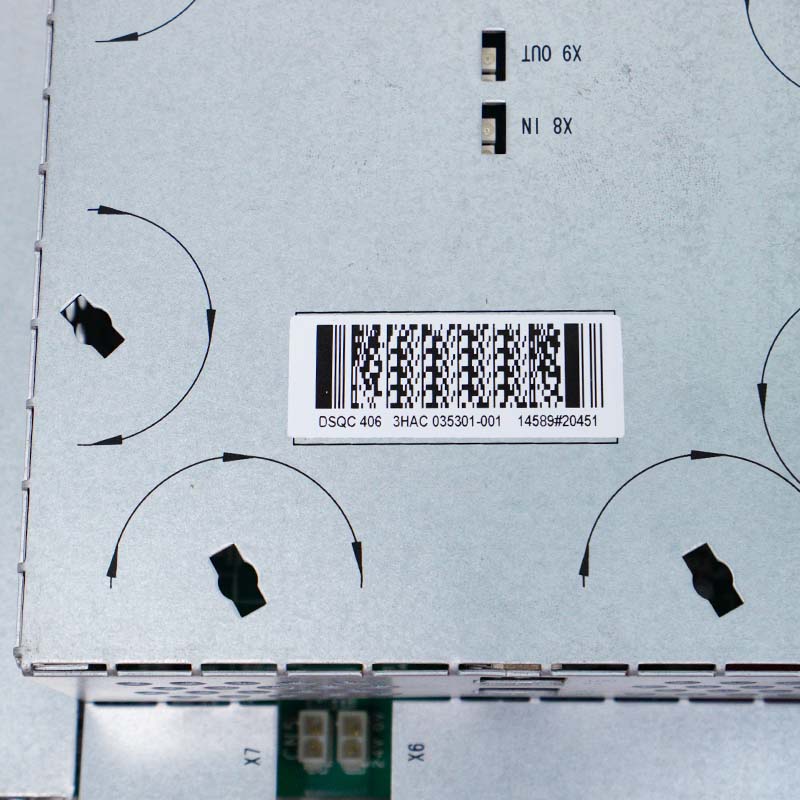
- Main Drive Unit MDU-430A 3HAC035301-001
- Provides precise position and speed control for robot axes
- It typically uses a 230V three-phase input voltage, has an output current capacity of up to 50A, and a basic torque rating of approximately 0.5 Nm
The ABB DSQC406 is an AC servo drive master module designed specifically for ABB industrial robots, such as the IRB 120 and IRB 140 series. It plays a crucial role in the robot control system, precisely controlling the position, speed, and torque of each joint motor. With its high-performance current output, the robot can achieve multi-axis linkage, enabling extremely complex trajectory movements.
This drive module features high-precision positioning and dynamic response capabilities, with a continuous output torque of up to 23 Nm and a peak torque of up to 46 Nm. It supports motor speed adjustment up to 3000 rpm and a maximum repeatability of ±0.001 mm, ensuring stable robot operation under high loads and high speeds.
The DSQC406 ABB Robot Main Drive Unit may still be available for purchase and support from Moore Automated Company beyond End-Of-Life (EOL) by the manufacturer (OEM).
ABB DSQC406 Robot Main Drive Unit MANUAL(Datasheets), Link
Important Notice: Other accessories, manuals, cables, calibration data, software, etc. are not included with this equipment unless listed in the above stock item description. All prices are shown in USD.
The DSQC406 unit operates on the ABB IRC5 controller platform (tailored for compact or stand-alone single-cabinet models).
It is primarily used to drive small-load robotic arms,
such as the IRB 120 and IRB 140.
The core operating principle of the DSQC406 drive module is based on digital signal processing (DSP) and space vector pulse width modulation (SVPWM) technology.
This module receives motion commands from the robot's upper-level controller. Its internal DSP and FPGA chips rapidly calculate these commands and combine them with the actual position and velocity signals fed back from the joint encoders to perform closed-loop control.
Subsequently, the module converts the control signals into PWM drive pulses, controlling the switching state of the internal IGBT power transistors, converting the 400-480V three-phase AC power into a current with adjustable frequency and voltage, ultimately precisely driving the servo motor.