Overview
Manuals
Professional applications
Working principle
Features:
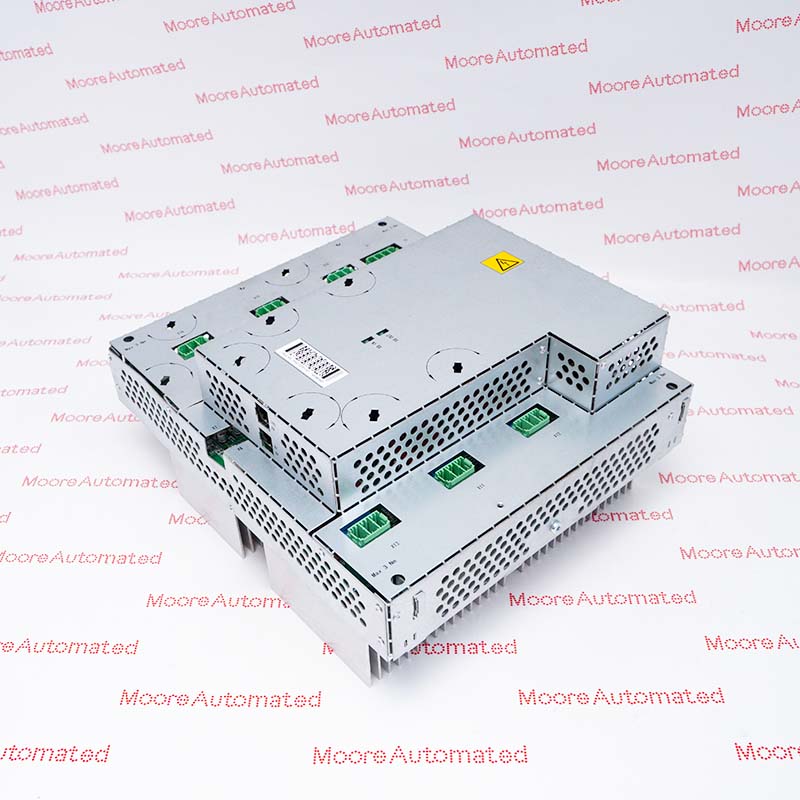
- ABB Robotics (IRB Paint Robot Manipulators)
- IRB 540-02/S4P and IRB 580 paint systems
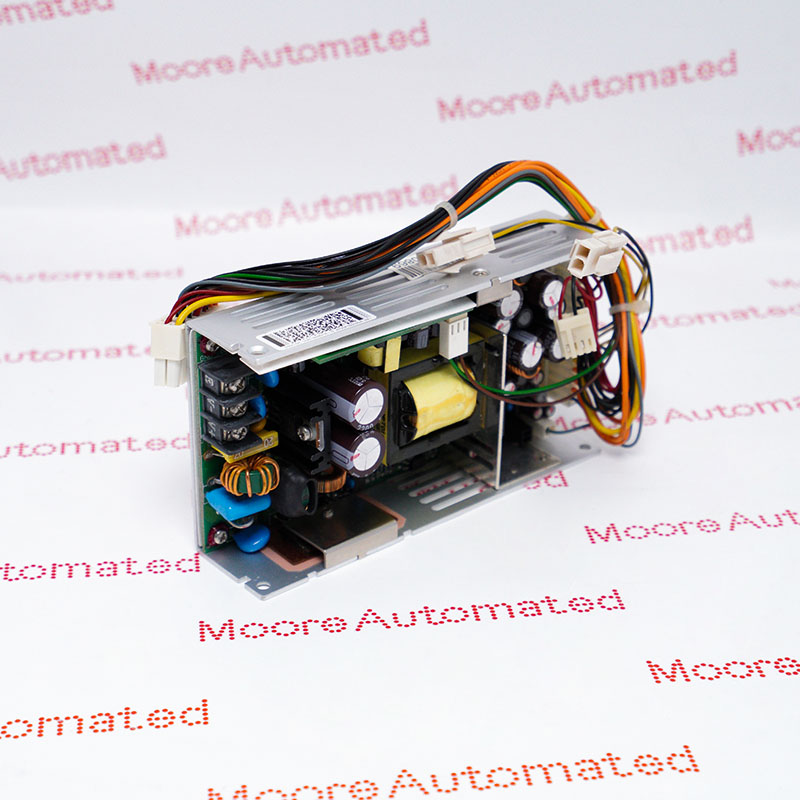
- Handles status indicator loops, system monitoring, and hardware feedback tracking for legacy control systems
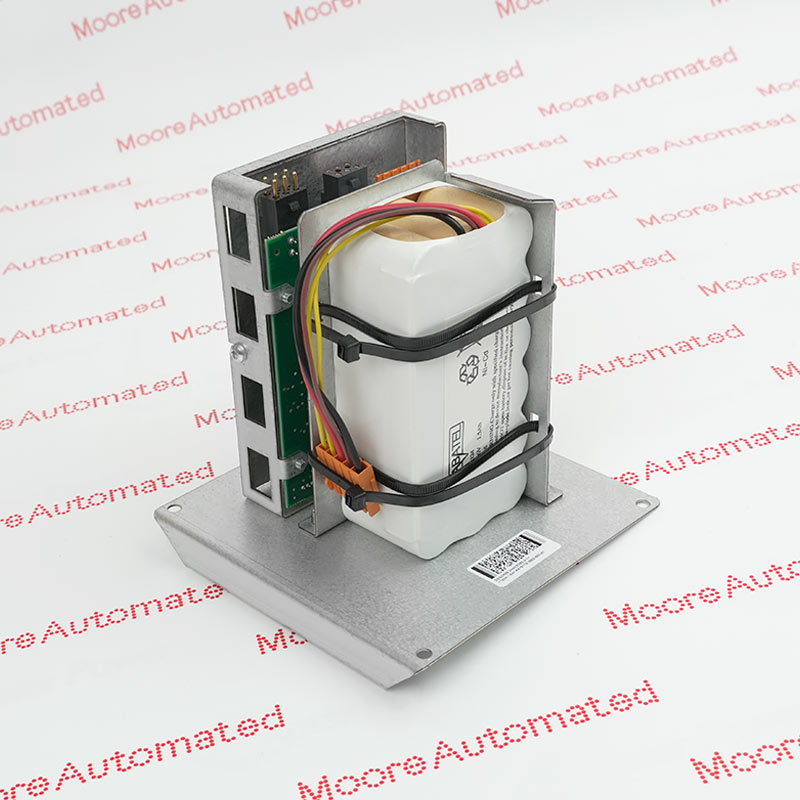
It is integrally cast from ductile iron (SJK 400 cast iron). Its core function is to act as a mechanical medium to realize the conversion between rotary motion and linear reciprocating motion (or non-coaxial rotation), provide key transmission torque support for robot joints or fine-tuning mechanisms, and ensure high structural stability of the robot arm during high-speed rotation or multi-axis linkage.
Furthermore, due to its robust materials and high-precision geometry, this eccentric component plays a crucial role in error compensation and dynamic balance during system operation. By fine-tuning its phase and angle relative to the mechanical spindle, it can effectively eliminate backlash caused by long-term wear of the reduction gear pair, thereby significantly improving the robot's trajectory tracking accuracy.
The 3HNM03189-1 ABB Robotic eccentric device may still be available for purchase and support from Moore Automated Company beyond End-Of-Life (EOL) by the manufacturer (OEM).
ABB 3HNM03189-1 Robotic eccentric device INFO(Datasheets), Link
Important Notice: Other accessories, manuals, cables, calibration data, software, etc. are not included with this equipment unless listed in the above stock item description. All prices are shown in USD.
In the mechanical field (industrial robots): In ABB robot systems (such as the IRB series painting robots or robotic arms), this code corresponds to a high-precision eccentric wheel/mechanism. Manufactured from high-strength cast iron (e.g., SJK 400 grade), it is primarily responsible for precise transmission, displacement compensation, and providing heavy-duty support for robot joints or links, thereby ensuring the accuracy of the robotic arm's motion trajectory during continuous high-speed operation.
In the electrical/automation field: In some industrial control cabinets or process control systems, it is also classified as an indicator unit board or PLC module. It is used to handle the system's low-level status feedback, signal indication, and logic tracing of control loops.
Its working principle is entirely based on classic eccentric mechanical transmission and geometric axis offset mechanisms. When the output shaft of the drive motor or reducer drives the 3HNM03189-1 to rotate around its geometric center line, due to its inherent eccentric characteristics, the bearings or connecting rods connected to the eccentric outer edge will generate periodic radial displacement relative to the central axis, thus transforming the originally simple uniform circular motion into a specific composite trajectory.
During this process, thanks to the high rigidity of the cast iron body, the mechanical load is evenly distributed. Combined with the position closed-loop algorithm feedback of the control system, nonlinear smooth amplification of the output torque at the joint end of the industrial robot can be achieved, or micron-level dynamic compensation of the transmission backlash can be realized.