Overview
Manuals
How It Works
Common Applications
Features:
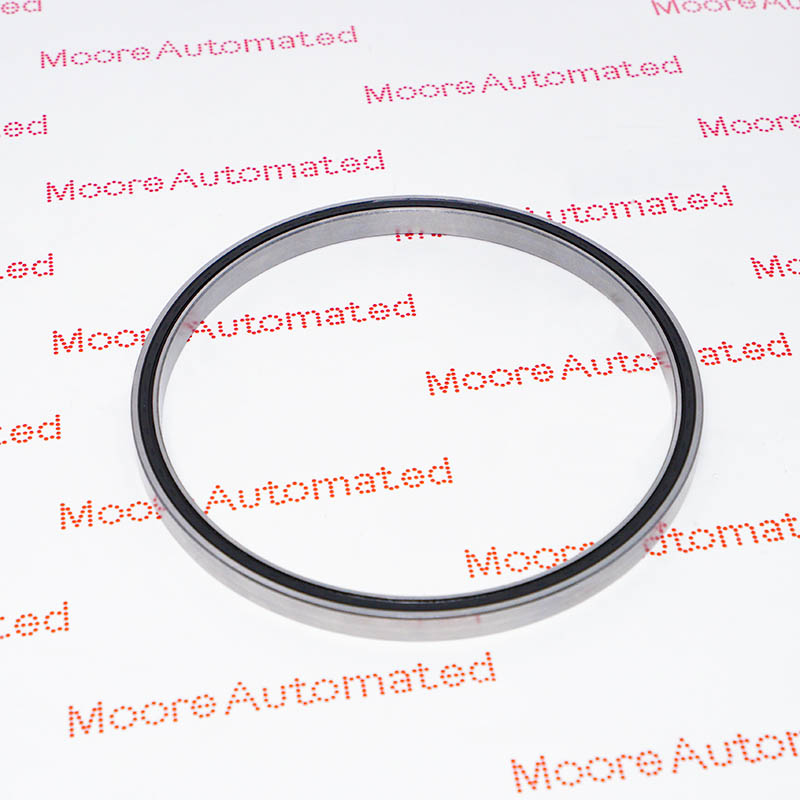
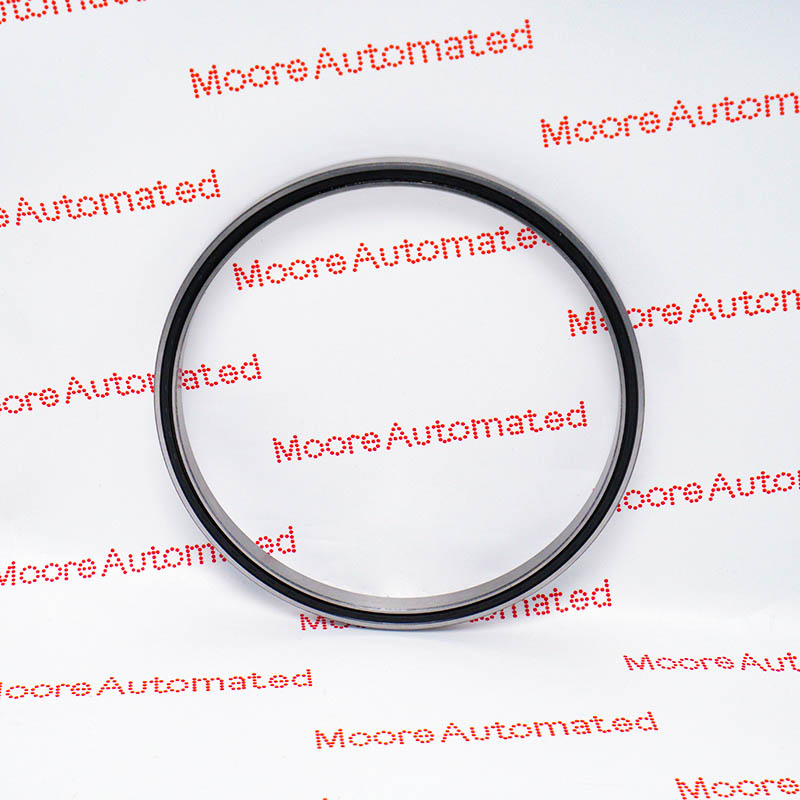
- Deep Groove Ball Bearing (Steel)
- Genuine ABB industrial deep groove ball bearing
- It is typically integrated into ABB IRB series industrial robot arms, automated conveying systems, and balancing cylinders to ensure low-friction, high-precision motion
The ABB 3HNP01759-1 (officially known as a grooved ball bearing) is a core precision mechanical component in ABB industrial robots and automated drive systems. This bearing is typically a standard OEM part and is widely used in rotary transmission components of the IRB series articulated robots, such as joint pivots, balance cylinder supports, external shaft supports, and conveyor rollers.
This device utilizes precision-machined rolling elements and raceways to maximize the conversion of sliding friction into rolling friction during the rotation of each axis, thereby reducing motor drive resistance and energy loss. Its highly consistent internal clearance and special industrial grease configuration not only absorb the alternating mechanical impacts generated during the high-speed reversal of the robotic arm but also effectively prevent metal thermal expansion and deformation caused by frictional heat generation during operation.
The 3HNP01759-1 ABB GROOVE BALL BEARING may still be available for purchase and support from Moore Automated Company beyond End-Of-Life (EOL) by the manufacturer (OEM).
ABB 3HNP01759-1 GROOVE BALL BEARING manual(Datasheets), Link
Important Notice: Other accessories, manuals, cables, calibration data, software, etc. are not included with this equipment unless listed in the above stock item description. All prices are shown in USD.
Its working principle is entirely based on classical rolling friction mechanics and contact stress distribution mechanisms. When the drive motor transmits torque to the robot's joint axis through the reducer, the inner or outer ring of the bearing rotates relative to the motor.
At this time, the high-precision steel balls (rolling elements), held between the inner and outer raceways, roll along the circumferential raceways under the constraint of the cage, evenly distributing the heavy cantilever load or radial tangential force acting on the joint axis to the local contact surfaces of multiple steel balls.
Through the continuous, low-resistance rolling of the rolling elements, the multi-directional mechanical loads in mechanical motion are transmitted and dissipated extremely smoothly. Combined with the robot's closed-loop feedback control, this enables industrial robots to achieve extremely stable, precise, and smooth high-speed rotational motion in three-dimensional space.
Robotics: Joint pivots and balancing cylinder mechanisms for ABB IRB 580 series and similar robot platforms.
Material handling: Support positions for external drive shafts or heavy-duty conveyor rollers.