Overview
Manuals
Principle
Core Applications
Features:
- Digital strip position controller
- SPCcompact is a digital strip position controller for evaluating the stationary EMG sensory system
- Serves as the main logic and computation board for the SPC16 control amplifier, responsible for managing complex strip guiding algorithms
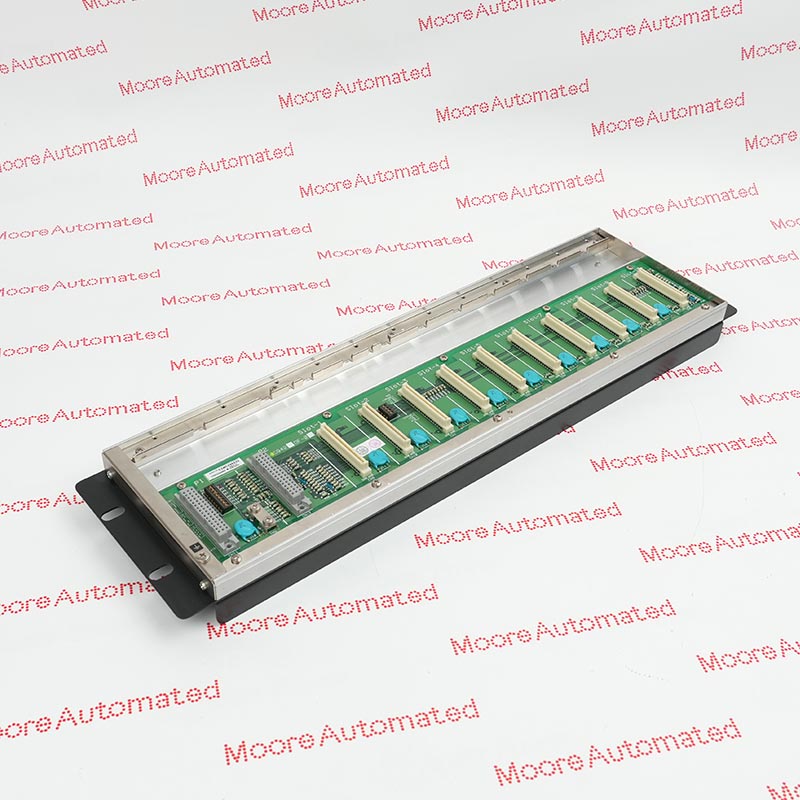
The SPCC1-7 is the core central processing board of the EMG SPC16 series digital control amplifiers. Its primary function is to act as the "brain" of the entire strip alignment system, receiving and processing raw position signals from inductive (e.g., SMI) or optical (e.g., EVK) sensors. Through its built-in high-speed logic algorithm, the SPCC1-7 can accurately calculate the strip's center offset or edge deviation and generate control commands in real time to drive hydraulic servo valves or electric actuators to perform alignment actions.
It coordinates data exchange between various expansion modules in the control system (e.g., input/output boards and sensor interface boards) and communicates with external ECU01.5 display units or host PLCs via RS232 or bus interfaces. The card also features powerful self-diagnostic capabilities, enabling real-time monitoring of the system's operating status, sensor health, and actuator feedback. Upon detecting any anomalies, the SPCC1-7 immediately issues an alarm signal to ensure the safe and stable operation of the metal processing production line.
The SPCC1-7 EMG Digital strip position controller may still be available for purchase and support from Moore Automated Company beyond End-Of-Life (EOL) by the manufacturer (OEM).
EMG SPCC1-7 Digital strip position controller datasheet(manual), Link
Important Notice: Other accessories, manuals, cables, calibration data, software, etc. are not included with this equipment unless listed in the above stock item description. All prices are shown in USD.
Its working principle is based on closed-loop digital control logic: the SPCC1-7 periodically acquires digital position data from the sensor processing board via the backplane bus, compares it with the set target value (reference point), and then uses a preset PID control algorithm to calculate the correction amount. Subsequently, the processing board converts the correction signal into a standard electrical signal and outputs it to the power drive stage, thereby controlling the actuator to change the physical position of the strip. The entire process is executed cyclically within millisecond cycles, achieving dynamic and precise tracking and compensation of the position of the high-speed moving strip.
Uncoiling/Rewinding Control: Synchronizes the lateral movement of the coiler with the edge or center of the strip to ensure straight edges on the coiled steel coils and prevent material damage.
Guiding Unit: Controls proportional-integral guide rails or tilting frames to correct the running path of the metal strip on long spans or deflection rollers.
High-Speed Processing Line: Integrated into pickling, galvanizing, and cold rolling production lines, managing real-time feedback from SMI inductive sensors to maintain stable material flow.
System Diagnostics and Communication: Handles data exchange between the central PLC and local I/O, and provides status information to the ECU01.5 display unit for operator monitoring.