Overview
Manuals
More Operating Info
Features:
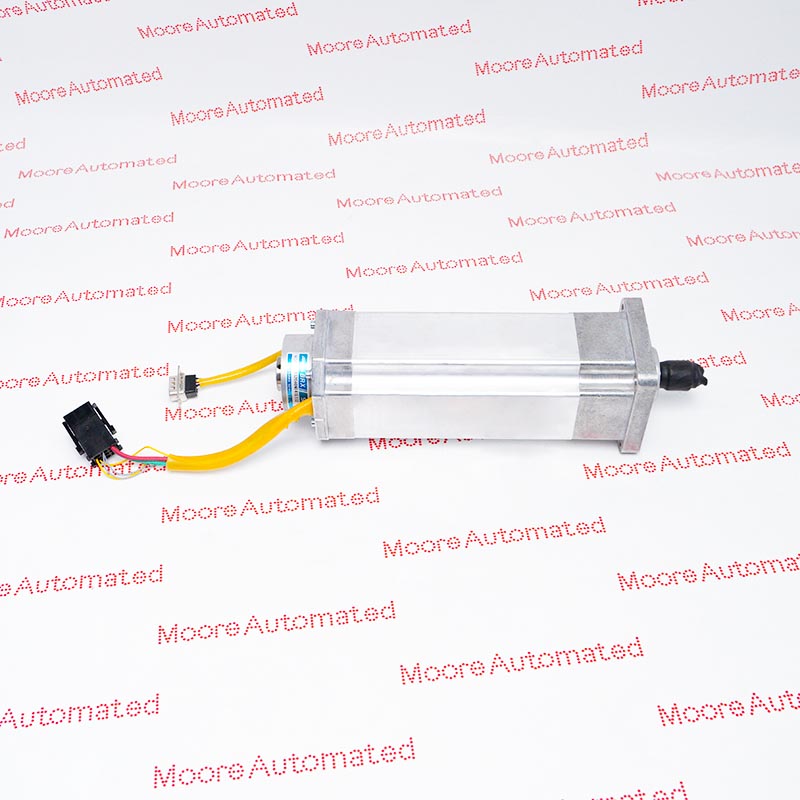
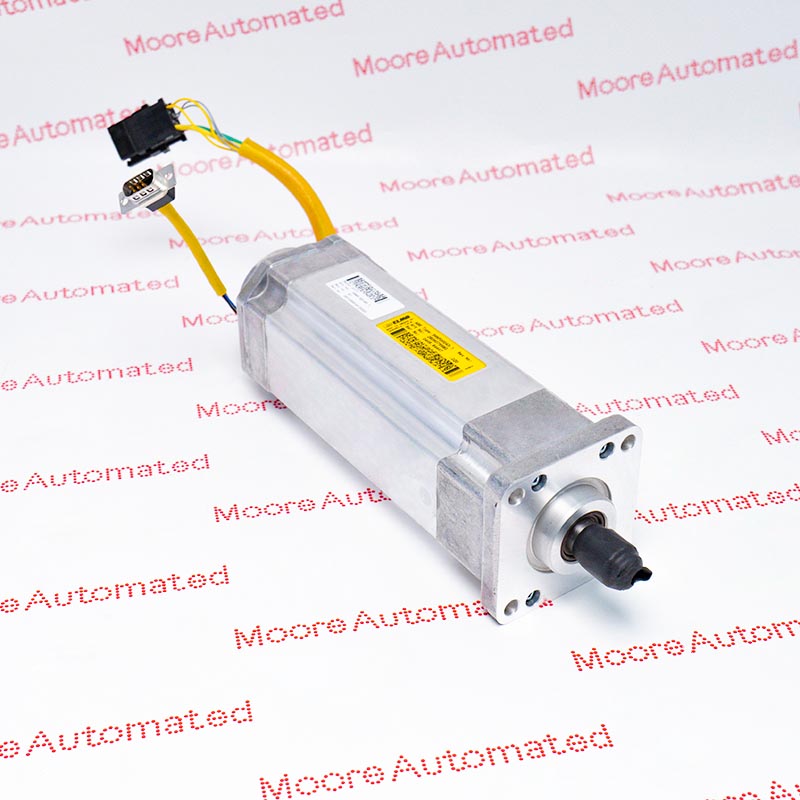
- Industrial Robot Servo Motor Unit
- Standardized 4-bolt flange design
- Features a dual-connection layout built alongside an integrated position feedback sensor system
Designed specifically for ABB industrial robot systems, such as the IRB 540, IRB 580, and IRB 5400 series painting robots or general-purpose robots. As the core power component of the robot joint, it is mainly used to precisely control specific motion axes of the robot (such as the fifth axis joint), undertaking the key functions of achieving high-precision trajectory tracking, speed adjustment, and precise dynamic positioning of the robotic arm, directly determining the robot's working efficiency and motion smoothness.
In terms of hardware configuration and industrial adaptability, this servo motor adopts a flange-type compact mounting structure, perfectly fitting the limited space requirements inside industrial robot arms. It integrates a dual-connection terminal design (including a power interface and a feedback signal interface) and comes standard with a high-resolution position feedback encoder (such as a rotary encoder or photoelectric encoder), supporting real-time closed-loop control.
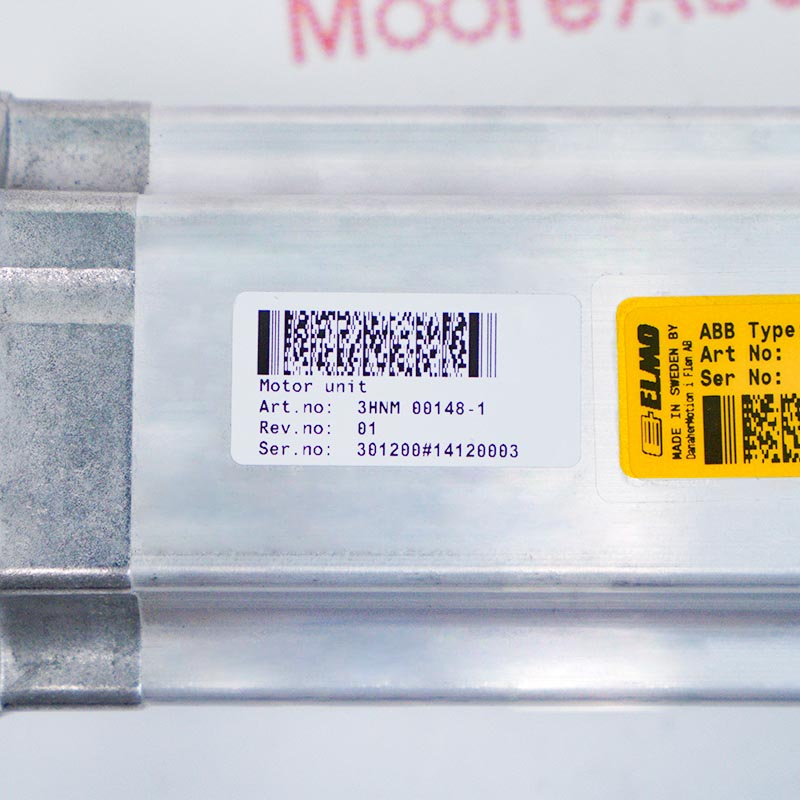
The 3HNM00148-01 ABB Robot Servo Motor Unit may still be available for purchase and support from Moore Automated Company beyond End-Of-Life (EOL) by the manufacturer (OEM).
ABB 3HNM00148-01 Robot Servo Motor Unit INFO(Datasheets), Link
Important Notice: Other accessories, manuals, cables, calibration data, software, etc. are not included with this equipment unless listed in the above stock item description. All prices are shown in USD.
The core working principle of the 3HNM00148-01 is based on electromagnetic induction and a closed-loop servo control mechanism. When the driver inside the robot control cabinet receives a motion command, it outputs three-phase alternating current to the motor stator windings, thereby generating a high-speed rotating magnetic field inside the motor.
This magnetic field interacts with the permanent magnets on the rotor, generating a strong electromagnetic torque that drives the motor spindle and the connected robotic arm joints to rotate. During the motor's rotation, the built-in feedback encoder converts the actual rotation speed, direction of rotation, and absolute angular position of the spindle into electrical signals at microsecond intervals and feeds them back to the control system.
Based on this, the microprocessor inside the control cabinet continuously adjusts the PID closed-loop algorithm to dynamically correct the robotic arm's positional deviation, thereby achieving high-speed path tracking and millimeter-level precision positioning for the industrial robot.