Overview
Manuals
On-Site Maintenance Tips
Operational Impact & Resolution Loss
Features:
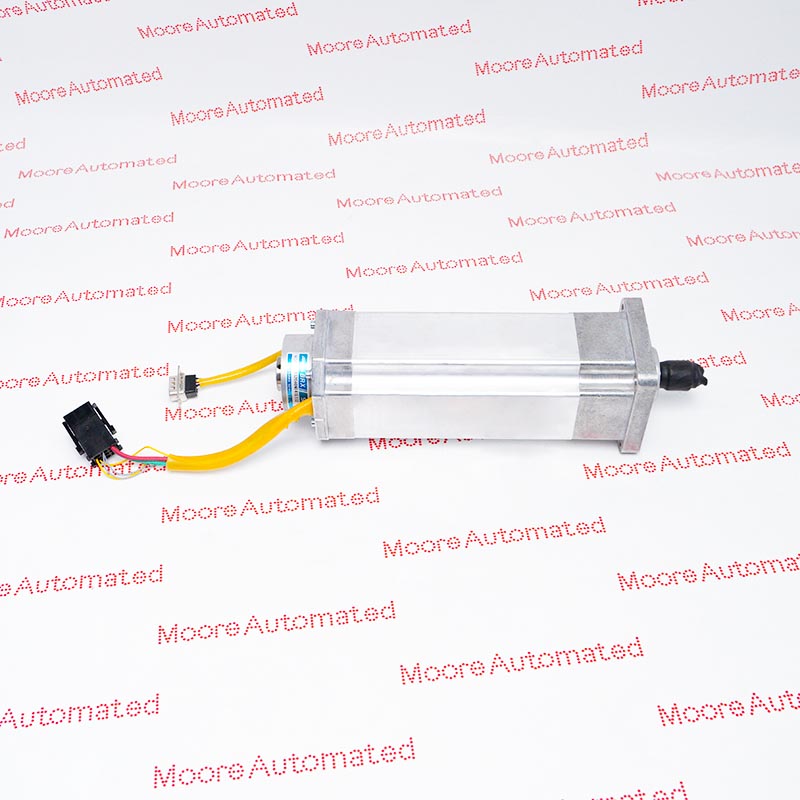
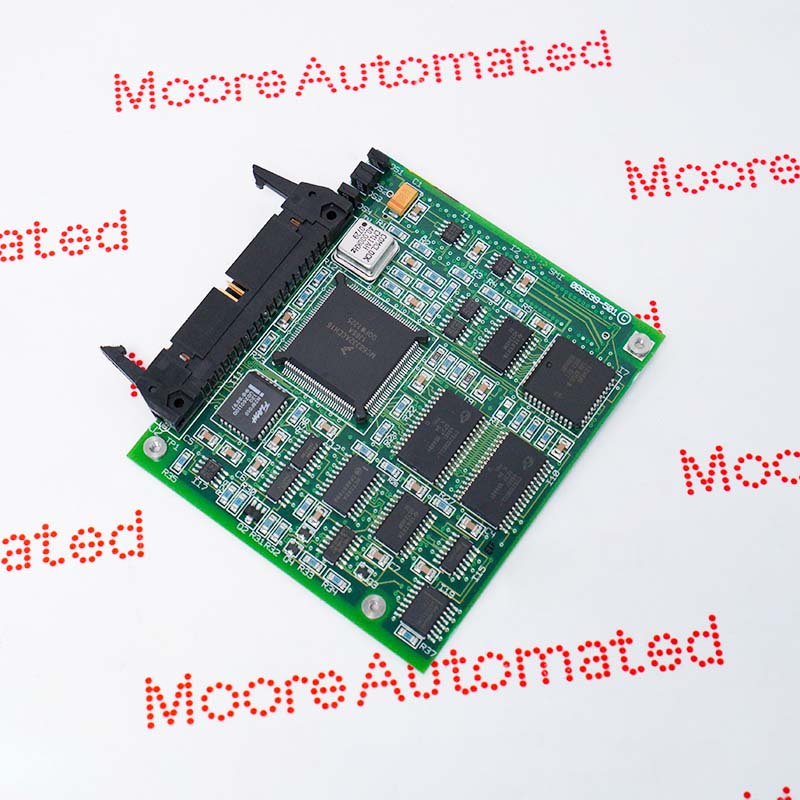
- Serial Measurement Board (SMB) / DSQC633
- Tailored exclusively for ABB Robotics IRC5 controller platforms
- Built for industrial environments with an effective operational temperature range spanning -20°C to +60°C
As the precision feedback center of the robot control system, it is mainly installed on the robot base or joint connection to collect and manage key motion data of each axis of the robot. It can seamlessly interface with the position sensors inside the robotic arm and, through efficient data flow interaction, assist the robot controller in achieving ultra-high precision path tracking, joint speed adjustment, and accurate dynamic spatial positioning.
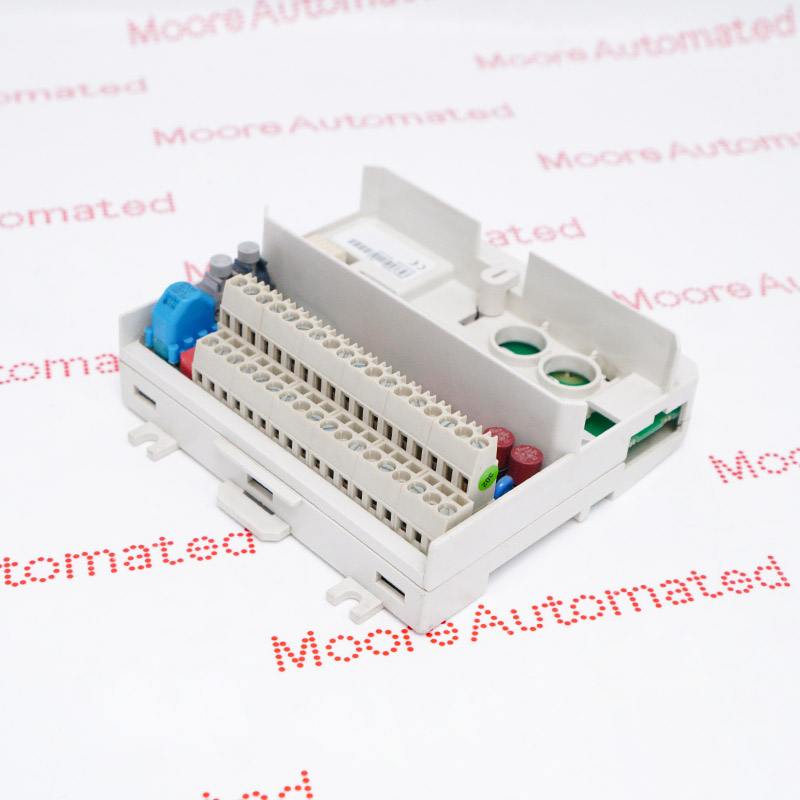
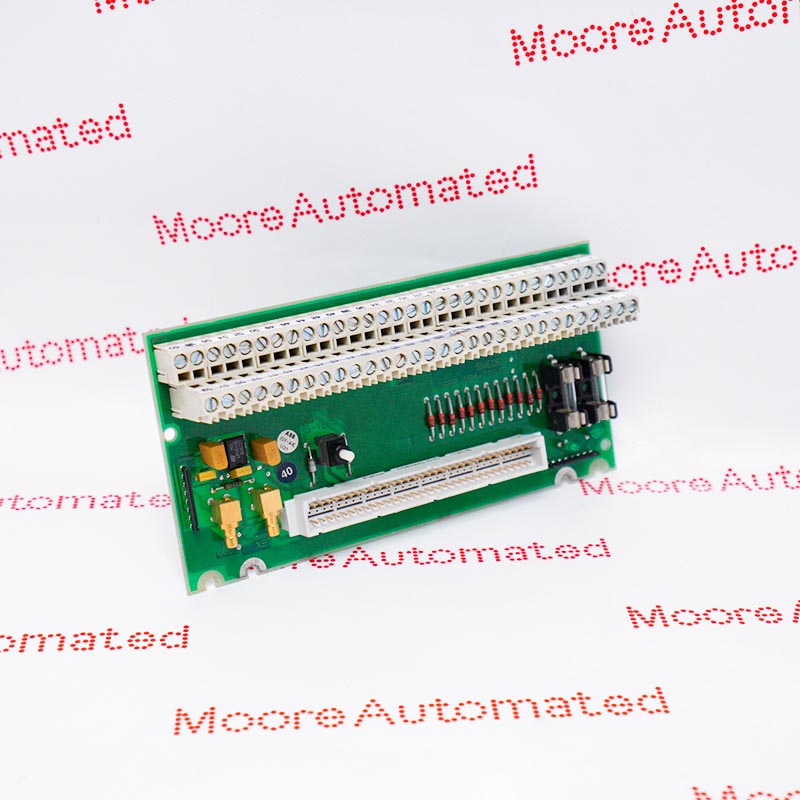
In terms of data security and multi-axis expansion, this serial measurement board integrates highly reliable hardware protection and communication mechanisms. The 3HAC021905-001 comes standard with an independent data storage chip (EEPROM) and a backup battery interface, ensuring that the robot's calibration offset and absolute axis position characteristics are fully preserved even in the event of an unexpected power outage in the main control cabinet, avoiding the need for complex zero-point resets during restarts.
The 3HAC021905-001 ABB SMB Serial Measurement Board may still be available for purchase and support from Moore Automated Company beyond End-Of-Life (EOL) by the manufacturer (OEM).
ABB 3HAC021905-001 SMB Serial Measurement Board INFO(Datasheets), Link
Important Notice: Other accessories, manuals, cables, calibration data, software, etc. are not included with this equipment unless listed in the above stock item description. All prices are shown in USD.
Position Data Management: The SMB board, often referred to as the robot's "nerve center," is responsible for collecting feedback signals from the encoders (or rotary transformers) of each joint axis, converting them into serial data, and transmitting it to the main control computer.
Absolute Position Memory: The SMB board is battery-powered. When the control cabinet is powered off, the SMB board continues to use battery power to maintain encoder data counting, ensuring that the robot does not need to re-find the mechanical zero point after restarting.
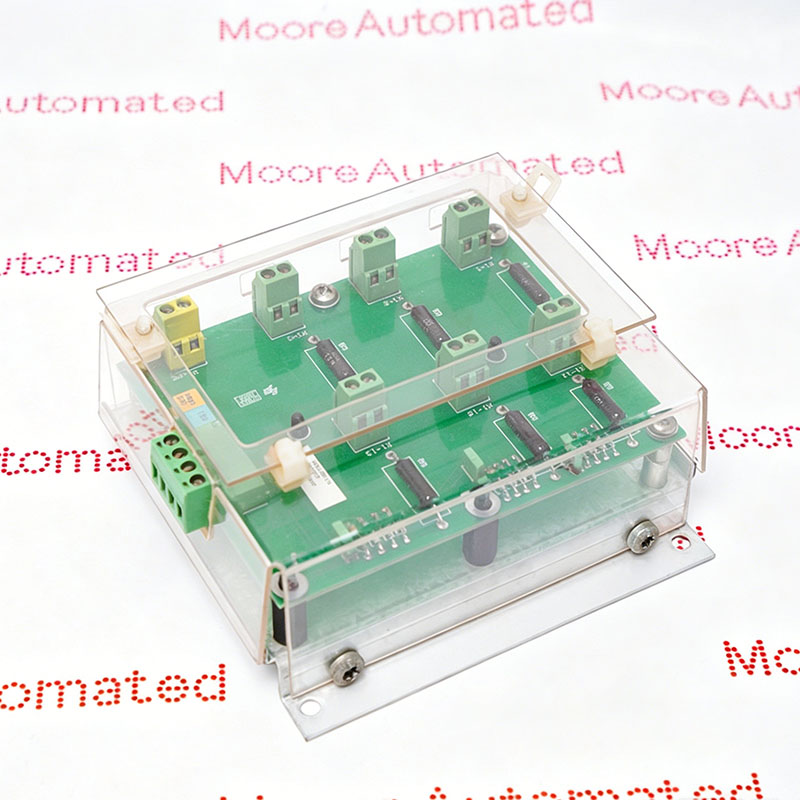
Common Troubleshooting: Low Battery (Low SMB Battery): This is the most common error message in the field. If this message appears, replace the SMB battery while the control cabinet is powered on. Never replace the battery while the power is off, otherwise the joint zero point data (calibration offset value) will be lost.
Rotation Counter Not Updated: If the battery fails after a power outage, the system will report a "Rotation Counter Not Updated" error upon restart. In this case, the robot's axis must be manually rotated to the scale mark position to perform a counter update operation.
The SMB onboard robot base is equipped with a dedicated backup battery interface. If the controller loses power and the onboard backup power fails, the robot will report a "speed counter lost" fault. In this case, a physical recalibration (updating the speed counter) is required before the robot can resume its production program.